Table of Contents
1. Introduction 4
2. Air
Traffic Investigation 10
3. Raspberry
Pi Air Traffic Monitoring System 15
4. Operational
Considerations 23
5. Data
Considerations 27
6. Database
Development 29
7. Results 37
8. Conclusions 52
9. Further
Research 53
10. Appendix
A – Location of Trackers 54
11. Appendix
B – Software Development and Component Parts 55
1.1
Persistent Jet Trail/Chemtrail Phenomenon
Since the mid-late 1990’s, people around the world have
observed what have become known, correctly or incorrectly, as “Chemtrails”.
Mainstream science and commentary mostly considers these trails to be a normal
result of everyday air traffic movements – i.e. they are purely and simply
condensation trails formed as a result of burning kerosene. Others maintain
they are part of a secret, clandestine “spraying programme” which is suggested
to be either for
·
Geoengineering in the form of some kind of “Solar Radiation
Management” (SRM)
·
Introducing toxins into the atmosphere to affect/control human
health
·
Introducing toxins into the atmosphere to affect/control
agriculture
This author has previously compiled 2 reports about these
trails and their possible nature. The reports were posted on http://www.checktheevidence.com/ in
2007
and 2010
respectively.
1.2
Trail Days and “Non-Trail Days”
One of the main unanswered questions is why we observe
days when no trails appear – not even ones that persist enough to actually see
them – and then on other days, we can observe many, many trails for such a
length of time that they can even seem to spread out and form a “haze blanket”. There
seems to be no satisfactory explanation for these different scenarios, beyond
either “hand waving” or making claims which are not supported by the evidence.
For example, if it is caused by the state of the jet stream, and its influence
on the stratosphere, there has been no clear explanation as to exactly what
sort of circumstances/conditions would cause trails to persist for many minutes
and, specifically, how jet stream changes would cause these conditions to
change.
In the photographs below, mainly from around the United Kingdom, a number of circles and grids of trails can be seen. There seems to be no
good, clear explanation for this and, to my knowledge, military exercises have
not been proven to be the cause of any of these “displays”. In one instance,
from the 16th of Jan 2012, it is alleged that a “NATO plane” created
these circles of trails,
though if this was true, the full purpose of the exercise that created them is
not clear. An article in the Louth Leader
claims “the aircraft was a NATO Sentry E3, a surveillance plane, which was on a
sortie completing a standard UK orbit.” (As of writing this report, the photo
shown below has disappeared from the site, though the story remains).
|

10 June 2005 - Borrowash, UK
|

21 Jan 2007, Humberside, UK
|
|

03 Aug 2007 – Borrowash, UK
|

15 Apr 2008 – Pyrenees, France/Spain
|
|

21 Feb 2009 – Borrowash, UK
|

16 Mar 2010 – Blaneau Ffestiniog, Wales, UK
|
|

Nov 2010 – Edinburgh, UK
|

29 Nov 2012 - Hendon, UK
|
|

16 Jan 2012 - Kidderminster, UK
|

16 Jan 2012 – Louth, UK
|
|

15 Mar 2013 - Grimsby, UK
|

04 Aug 2013 – Ashtead, UK
|
|

18 Aug 2013 – Ashtead, UK
|

10 Jan 2014 – Lancashire, UK
|
1.4
Questions, Petitions and Investigations
There has been little, if any, formal investigation into
the phenomena shown in section 1.3, though a number of people have tried to
raise questions formally using an FOIA
and through lobbying politicians – such as through the Skyguards group,
which organized a meeting in the European Parliament in Brussels in April 2013.
In 2007, Rosalind Peterson gave an address to a UN Climate Change meeting in New York.
Many hundreds or even thousands of “YouTubers” have uploaded
videos of various kinds – some are particularly strange and show planes
trailing together – with examples in Germany
and in the USA.
A number of independent, good quality documentary films have been made by
people such as Patrick Pasin,
Clifford Carnicom,
and Michael Murphy.
There are others of varying quality.
Despite all these strange instances of significant
trailing, no official answers are forthcoming – only flat denials. It is
therefore left to those people who have observed these troubling anomalies, to
do their own investigation. This report is the result of one set of
investigations.
1.4.1
“Overcast” Documentary by Matthias Hancke et al to “Sample a Trail”
This documentary has been in the works for almost 1 year
and may be released later in 2014. Matthias Hancke intends to scientifically
sample and test material from a persistent trail/chemtrail. Matthias has
already done some sampling, but has had problems with the sampling process and
has needed funds to complete scientific/chemical analysis. Further updates can
be found on the Facebook page
and crowd-funding page.
1.5
Standard “Explanations” for the Phenomenon
A number of websites, including http://contrailscience.com/ and Wikipedia
claim that all trails that are ever seen are contrails. While these sites do
contain some valuable scientific information, you will not find a full
explanation for the phenomena shown in the photographs in section 1.3 – to be
valid, these explanations would need to include flight numbers and
identification of planes on the dates shown. Instead, this evidence is
hand-waved away and assumed to be covered with a tagline such as THE SCIENCE
AND PSEUDOSCIENCE OF CONTRAILS AND CHEMTRAILS.” Metabunk.org also has some
interesting observations and analysis, though is somewhat selective about what
it shows and analyses, as is the case with contrailscience.com.
1.5.1
Barium in Rainwater?
One claim that has been made several times is that there
is a toxic level of barium in some rainwater – this claim has not really been
proven to the point where it can be linked to “chemtrails”. An example case is
that of Bill Nichols of Arkansas, USA
– which was reported on KLSA news in 2007. There is a good analysis on
contrailscience.com regarding this case.
Similar claims about aluminium levels have been made by Francis Mangels of California, USA
– but it is not well known that some soils can contain aluminium salts in clays
and so on. However, the fact remains that barium titanate has been proposed by
the likes of Dr David Keith as a compound to be used in possible Solar
Radiation Management projects.
1.6
The Reasons for Persistent Jet Trails/Chemtrails Appearing
Many reasons are suggested
for Chemtrails. Clifford Carnicom has proposed the following possible reasons
·
To help create environmental or climate changes,
·
To introduce biological materials to affect humans or agriculture
·
For “military purposes”
·
To change the electromagnetic properties of the atmosphere
·
To cause geophysical or global effects
·
To enable operation of exotic propulsion systems
At this point, it is clear the phenomenon is real – but it
is not really clear if the trails are being created through the use of fuel
additives or whether there are aircraft in operation that have a separate
spraying system installed. Some people claim to have photographed additional
nozzles on aircraft, but in some cases, these have been shown to be for other
purposes such as science research projects (there are some examples on the
“metabunk” forum
such as a study of a story entitled "Exclusive: Leaked Photos of Chemtrail
Dispersal System".)
1.6.1
Are Trails Appearing as a Result of External
Manipulation of our Atmosphere?
One possible explanation that I have
proposed in the past is that at least some of the trails are appearing because
the atmosphere is being manipulated by some unknown technology – perhaps
similar or the same as what was almost certainly used around the time of 9/11/01
to steer Hurricane Erin.
Perhaps it is based on some of Wilhelm
Reich’s Orgone technology.
1.7
Lack of Genuine Whistleblowers
Unfortunately, no genuine, knowledgeable whistleblowers
seem to have come forward with detailed information that can be supported by
comprehensive documents, photographs or videos. Though there has been internet
chatter about people like A.C. Griffiths
and Kristen Meghan,
they do not seem to have brought forth any verifiable, solid information.
Though they may have made reference to documents such as “Owning the Weather by
2025”
and other documents that have been produced by the military, they don’t seem to
have explained many – or even any – of the observations we have made.
1.8
Chemtrails/Jet Trails in Advertising and TV
Visuals
There does seem to be an unusual prevalence
of jet trails in advertising and in places where you might not expect them to
be shown – I have collected some examples on this
page. One especially
curious example was seen in a 2005 Virgin Trains commercial.
In 2013, the BBC Wimbledon Introductory Visuals showed a trail in almost every shot where the sky was seen. Was it
just innocent re-use of a stock image?
This report represents the preliminary results of ongoing
attempts to measure levels of air traffic over several locations during times
of clear skies and during times when persistent trails or “chemtrails” appear.
It is not meant to be an explanation for chemtrails – and,
indeed, it is not meant to “debunk” anything or anybody. This does not appear
to prove there is a conspiracy to spray aerosol compounds in the sky – even
though that it is possible that this is actually what is happening. It was
simply an attempt to try and match or collect air traffic counts and log
aircraft movements and then correlate this data with the appearance of trails.
In this regard, at least, it has served a useful purpose.
2.1
ADS-B – What is it?
The whole project/system relies on the fact that many
aircraft are now transmitting ADS-B (Automatic Dependent Surveillance –
Broadcast) messages when in flight. These messages contain the following
information
·
A code number identifying the aircraft (sometimes called “ICAO”)
·
Flight Number
·
Altitude
·
Position (Latitude/Longitude)
·
Speed
·
Heading
(This page has a good explanation: http://planefinder.net/about/ads-b-how-planefinder-works/.)
The tracker simply receives and decodes these messages – then software can be
used to process the messages in any way desired. For example, you can count the
number of aircraft which are detected in a given period, within a certain range
and above a certain altitude or between certain altitudes.
Not all aircraft broadcast all the information above. It
seems only about an average of 40% of aircraft detected broadcast their
position.
2.2
Detecting Aircraft Flying Over Your Location
2.2.1
Early Equipment
This project essentially started in perhaps 2006, when I found
out that it was possible to detect aircraft flying over a particular location
(e.g. your own house!). At that time, I became aware of a piece of equipment
called the SBS-1
– which would decode ABS-B messages that it could receive from aircraft. It
was then an obvious question to see if it could be used, in some way, to
identify and/or track aircraft that appeared to be leaving persistent trails or
“Chemtrails”. However, the cost of the equipment (£500) was an initial
deterrent to taking this idea further, at that time.
|

|

|
|
SBS-1
|
Airnav Radarbox
|
2.2.2
 More Recent Developments
More Recent Developments
In the last few years, websites
such as www.FlightRadar24.com, Flight Aware and Planefinder.net have offered tracking and
aircraft identification features, though they can in some cases be slow to
update and somewhat cumbersome to use. Similarly, there are Android and iPhone Apps which
interface to these online services and allow you, for example, to identify
flights by holding up your phone in the direction of a plane in the sky. Of
course, not everyone has an iPhone or Android phone...
As far as I am aware, the
Website and Phone App solutions don’t have logging features of any great
sophistication, so are not much use other than for “realtime viewing and
tracking”.
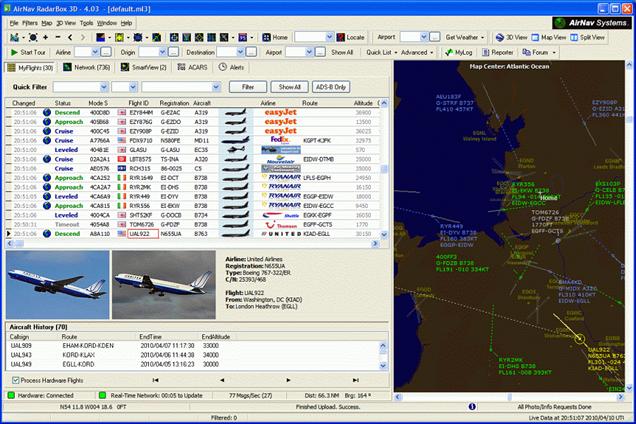
2.2.3
Airnav Radarbox
In 2010, I decided to invest in an AirNav Radar Box as I was
still very curious as to what could be determined from using one to track
aircraft. An important feature was that of “logging” any aircraft it detected –
this meant that the unit could be left unattended and data could be examined
retrospectively. However, there was still no easy way to get a visual record of
trailing, other than deciding to go out with a camera and photograph the sky
during periods of trailing. This was not very practical, as time could not be
devoted exclusively to a “tracking project.”
2.2.4
Airnav Software
The software that was shipped with the Radarbox provided a
“virtual Air Traffic Controller’s (ATC) display” – all quite natty, but its
logging features were limited. For example, it could keep a list of all the
aircraft detected – and it could even playback a recording of logged data, but
it was not able to produce charts or, for example, count the number of aircraft
detected during a specified period, such as 30 minutes.
2.2.5
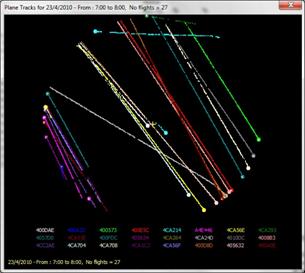
Creating Charts of the Paths of Aircraft Detected
One of the original goals was to try and create charts
which would show the path travelled by aircraft – this might allow the
appearance of trails to be matched with the “charted path” of an aircraft – to
see how close the visual trail matched the logged/charted path.
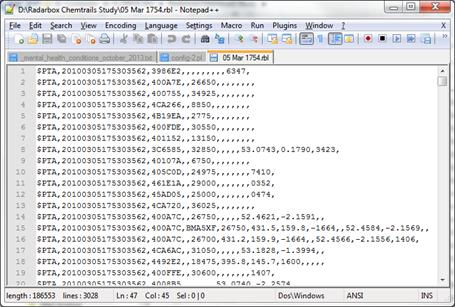
Airnav Radarbox Logfile
It was not initially clear how to do this, as the logfile
simply consisted of lines of text, with the following columns:
It was therefore possible, in theory, to determine the path
of an aircraft by plotting the indicated/logged latitude and longitude figures,
although this was made more complicated by the fact that the log file was
simply a list of logged messages from all aircraft in range of the receiver –
the list was not “sorted by aircraft”.
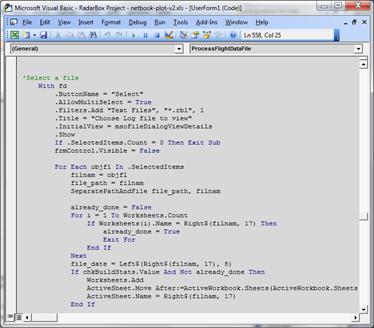
Some Visual Basic for Applications (VBA) routines were
developed in Microsoft Excel to process these Radarbox files and
(a) Generate charts of the
paths of aircraft and
(b) Generate counts of
aircraft detected in certain time periods.
|
|
|
|
A
short section of VBA code used to generate charts and counts.
|
Aircraft
Chart Generated by VBA Code from Airnav Logfile.
|
|
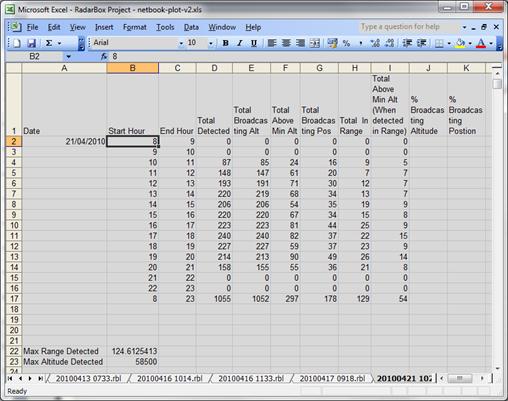
Counts
were stored in spreadsheet worksheets for days when logging was running.
|
The data obtained from these logfiles was satisfactory, but
time consuming to process and match up with observations.
2.3
Wireless Webcams – Photographing the Sky
|

|

|
|
Time-stamped
Webcam Image
|
FOSCAM Wireless
Webcam
|
Another step was to try and photograph the sky at regular
intervals automatically. This was achieved using a pair of FOSCAM wireless
WebCams. These could be appropriately positioned on a window sill (indoors –
weather proof units were more expensive and more difficult to cable up for
power requirements).
2.4
Control Program for Webcams and Airnav Logging
A small program was developed which would then switch on
the aircraft logging in the Airnav Box Software and also, between dawn and
dusk, capture sky images from the 2 webcams and insert a time stamp in each
image. All the data was saved on a Netbook computer, which had to be left
running 24 hours per day. Unfortunately, this netbook was used for other
purposes, for a few days at a time, which meant the logging could not be run
for more than a few days at a time.
This programme was not 100% reliable, as the Airnav data
logging could not always be successfully switched on. This meant it was not
really possible to build a consistent set of data which could be used to count
aircraft over an extended period of several weeks or months.
3.1
 Raspberry Pi
Raspberry Pi
The Raspberry Pi is a small, credit card sized fairly
powerful computer which runs a version of an Operating System called Debian
Linux. It was released in 2012 – See http://www.raspberrypi.org/help/faqs/
for more information. I had obtained one not long after the release and set it
up as a low-powered file server.
It is a credit to the way that Open-Source software systems
work that allows developers now to plug together software and hardware
components and build both hobbyist and professional projects – to a high level
of sophistication – in a relatively short period of time. With appropriate
programming knowledge, customisation of software is straightforward and
practical. Coupled with the vast and easily searchable resources on the
internet, solutions to common problems can quickly be found, enabling system
reliability to be improved much more easily and more quickly. Significant
computing power in a small, cheap and energy-efficient package also means that
more and more advanced projects can be envisioned and developed at a modest
cost of only a few hundred pounds.
In June 2013, I wondered if it was possible to connect the
Raspberry Pi to the Airnav Radar Box – essentially to replace the Netbook and
allow the Pi to take the data from the Airnav box and save it, so that I did
not have to tie up a Netbook for this purpose.
After finding a forum discussion about this, I also found
another and potentially better way of doing a similar sort of thing and “Pitracker”
started to become a workable idea.
3.1.1
Dump1090 – ADS-B Message Reception and Decoding on Raspberry Pi
 I discovered forum posts and web pages which showed how it was
possible to connect a USB dongle to the Raspberry Pi and, having compiled some
software, the Pi was able to do most – if not all – of what the Airnav Radar
box would do – for a fraction of the cost. A page by Dave Taylor
provided a solid basis for some further Raspberry Pi development.
I discovered forum posts and web pages which showed how it was
possible to connect a USB dongle to the Raspberry Pi and, having compiled some
software, the Pi was able to do most – if not all – of what the Airnav Radar
box would do – for a fraction of the cost. A page by Dave Taylor
provided a solid basis for some further Raspberry Pi development.
By getting the right type of USB Dongle – a Digital
Terrestrial Broadcast Receiver Dongle (DVB-T) with the correct chipset
(R820T/RTL2832U), I could track aircraft in realtime using a Raspberry Pi.
Hence, all that was now needed was additional software to do the logging and
counting. This was made much easier because the program which decoded the ADS-B
messages also presented data from them through a web page interface. This
program was written in C. In other words, all the hard work of decoding ADS-B
messages was already done – I just needed to add some code to count the
detected number of aircraft and generate charts.
3.1.2
Counting Aircraft
It was relatively straightforward to adapt the Dump1090
program code to make it count detected aircraft in a set period. It was also
possible to get it to count aircraft in various categories – such as those
above 25000 feet, where trails are formed. All these counts were saved into a
“daily data file”. Additionally a log of all aircraft detected was generated and
saved. The main software development was done using a Ubuntu Linux installation
with the help of the Codeblocks IDE. (The TV Dongle and Dump1090 code could
also be used within a Linux installation.) The C code was simply copied onto
the Raspberry Pi and compiled so that it would run on the Raspberry Pi directly.
3.1.3
 Photographing the Sky
Photographing the Sky
In May 2013, a custom camera board was released for the
Raspberry Pi and this could be operated by software that ran on the Raspberry
Pi. It was now therefore possible to have the Pi log and track the aircraft - and
photograph the sky – unattended, and using less than 8 watts of power.
Additionally, raspberry Pi camera images were of considerably better quality
than the Web Cams, as the Pi Camera has a 5 megapixel sensor.
3.1.4
Automatic Capture of Weather Data
Using the World Weather Online website - www.worldweatheronline.com – it
was possible to obtain weather data at regular intervals, to be saved with the
air traffic counts. Although ground-level weather data is not especially useful
in relation to conditions which may affect the formation of trails at 25,000
feet and above.
3.1.5
Configuration Data
In order to generate meaningful data, it was necessary to
add a “configuration feature”. Most importantly, the latitude and longitude
that the Raspberry Pi was located at needed to be set up – this would then
allow measurements to be made based on this location.
3.1.6
Webserver/Webpage to Display Realtime Plane Positions
The Dump1090 software also contained features which allowed
the software to generate a Webpage which would show the positions of detected
aircraft on a Google Map in real-time, along with any available data about each
aircraft detected. However, this Webpage view defaulted to show a location near
London, so this part of the software was also modified to display a map based
on the configured location. Additionally, the webpage was modified to include
additional features, such as aircraft counts and local weather data.
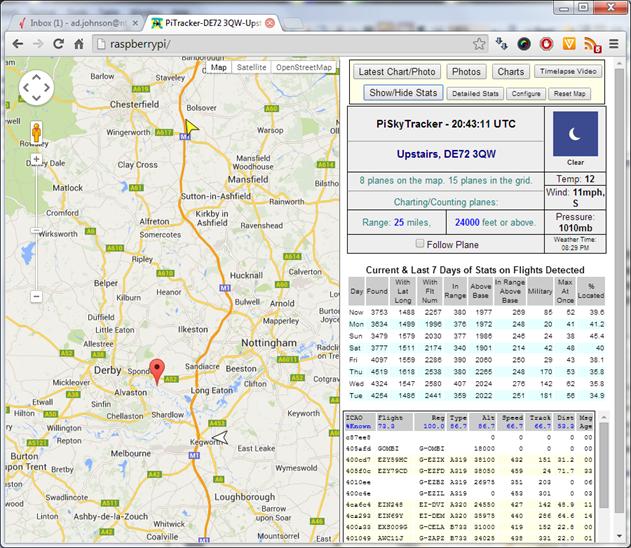
Realtime-Webpage/Google
Map view Generated By Raspberry Pi Tracker
3.2
Acknowledgements to Volunteers
I am grateful to those 5 volunteers who agreed to host
trackers and help me set them up. Without their help, this project would not
have been able to gather nearly as much data.
3.2.1
Multiple Trackers – Remote Configuration and Upload of Captured Data
In order to get a better sample of data, it was decided
early on that several “Pitrackers” should be put into operation, so several
volunteers, from around the UK were asked to host them at their homes. This
meant that a method had to be developed for transferring the data captured by
these trackers to a central location (my own Raspberry Pi file server!) Hence,
existing scripts were modified and a server was configured to accept and store
the uploaded time-lapse video and aircraft data. Additionally, working with
volunteers, the trackers were, when possible, set up to be remotely
configurable, which meant that if certain problems developed in their
operation, or software needed to be modified/updated, this was possible (and
was necessary on more than one occasion). This was made possible by configuring
the volunteer’s home router.
3.3
System Components and Overall Operation
This diagram illustrates the
components and general operation of the tracker system.
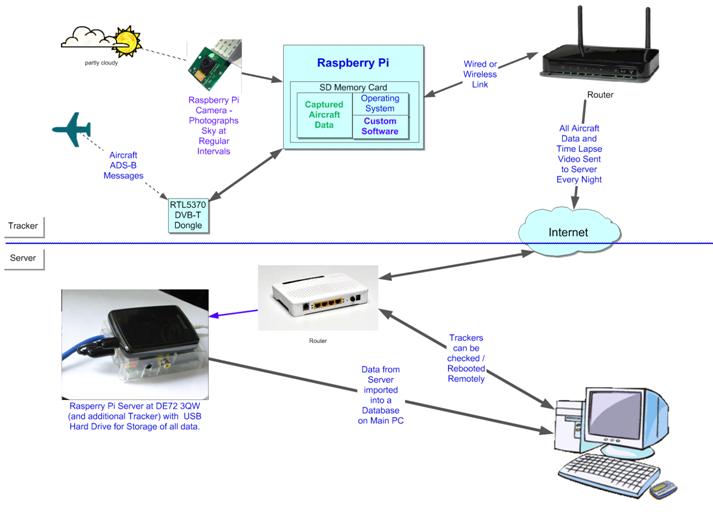
3.3.1
System Operation
The system uses an unmodified Raspberry Pi with an SD
Memory card (like those used in Digital Cameras and similar devices). The
memory card holds both the Raspberry Pi Linux Operating system (“Raspbian OS”)
and it is used to store the data acquired from the aircraft, as well as photos
taken by the Raspberry Pi Camera.
Trackers were placed, when possible, on an upstairs window
sill, which had a clear view of the sky. Once configured with a postcode,
latitude, longitude and station name, they were left running 24 hours per day,
7 days per week. The tracker software included features to calculate local
sunrise/sunset times and would only capture images and create plane charts
during local day time.
Linux “scripts” and commands were created to compress
(“zip”) each day’s data files and upload them to the server between midnight
and 6am. Similarly, time-lapse videos were generated and uploaded to the server
every night.
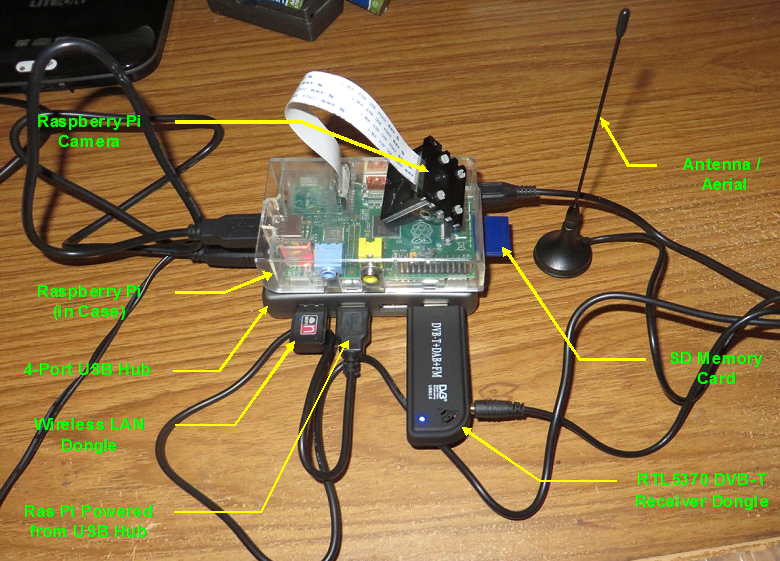
Single
tracker in operation.
3.3.2
Plane Charting
By using Linux Open Source
Graphics Libraries (libplot and libglib), it was possible to plot aircraft
paths on charts – as the data was captured by the Rasperry Pi. Charting
parameters could be set so that planes within a certain range were drawn on the
charts (which were created every 30 minutes by default). Only planes above a
certain altitude were logged on the chart.
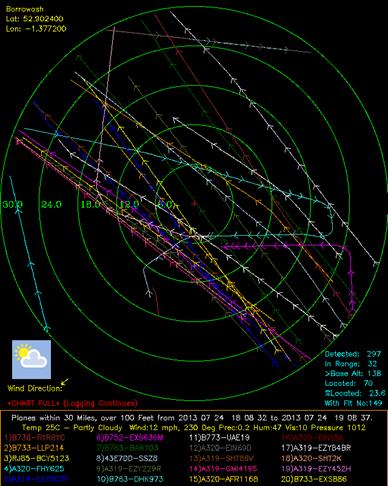
Aircraft “Traffic
Chart” generated by Raspberry Pi Software (100 foot base altitude)
These charts were saved in PNG format (a useful feature of
the graphics libraries).
3.3.3
Aircraft Data Saved in CSV Format
Aircraft Data was saved on the Raspberry Pi’s SD Card - in a
standard Comma Separated Value (CSV) format, which could be easily read and
processed by other software.

Aircraft Count Data
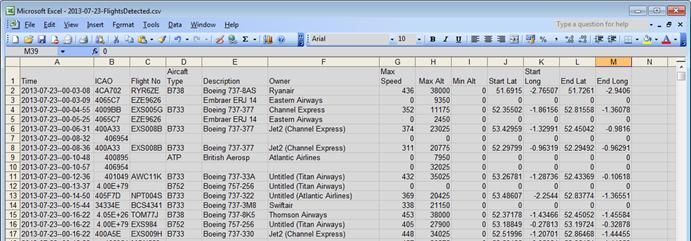
Flight Data for Each
Aircraft
3.3.4
Time-lapse Videos
After realizing that the sky needed to be photographed
approximately once every minute, it was realized that several hundred photos
per day would be generated and these would need to be reviewed to check for
trails. Clicking through hundreds of photos per day would have been a slow
process, so it was soon determined that the Raspberry Pi was capable of
automatically generating time-lapse video files (in MP4 format) by using
another package called libav-tools.
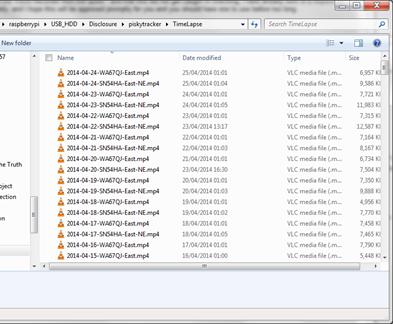
Time-lapse Video
Files Stored on Server
In experimenting with the
AirNav Radarbox Software, it was discovered that it held an aircraft database
which contained records for about 155000 aircraft. Each record held information
about
·
The type of aircraft
·
Country of “Residence”
·
Airline / Owner
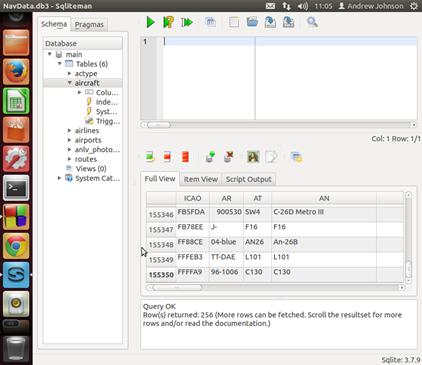
This Database was stored in a single file, which was
copied onto the Raspberry Pi’s SD card. This allowed data about most of the detected
aircraft to be written to a log file. Before the trackers were put into
operation, this database was updated using additional data held in a text file
from a free Windows package called PlanePlotter.
3.4
Tracker Database Development
In order to generate some statistics from all the data
files collected, a method was needed to collate all the data. Originally, some
tests were made just using collections of daily spreadsheets that had been
generated by the trackers. However, this method was too cumbersome and it was
much more difficult to, for example, average out sets of figures over weeks or
months. Hence, after data had been successfully collected for several months, a
Microsoft Access Database was developed and data from the CSV files was
manually imported into this database.
4.1
Tracker Reliability and Continuous Operation
Over a period of several weeks, the reliability of the
tracker was tested – could it run autonomously for days or weeks at a time?
Updates to the Raspbian OS were still appearing every few weeks and by about
Sept 2013, it seemed that trackers could run for long enough periods. However,
it was still necessary to implement strategies to ensure continuous/smooth
running of a tracker. This included such things as:
4.1.1
Watchdog Reset
If the Raspberry Pi “froze”, then a watchdog timer would
reset/restart it after a short period. The watchdog was not enabled by default,
but again forum postings were found which gave instructions as to how to enable
the watchdog reset.
4.1.2
Dongle Reset
Under certain circumstances, it seemed that the DVB-T
Receiver Dongle would become unresponsive, so a method to detect this situation
and then reset the dongle was devised.
4.1.3
Memory Card Capacity
A 4GB card was used on some trackers and an 8GB card was
used on others. In both cases, however, it was not exactly clear how many days
it would be before the card became filled with saved data. Most storage space
was used by the time-lapse videos and the hundreds of camera images. In
practice, it turned out that between about 15 and 25 days worth of data could
be stored. A method was therefore added to delete data after a certain number
of days (this could normally be done safely, because each day’s data was
uploaded to the server every night – and the upload method proved fairly
reliable).
4.1.4
Remote Control, Update and Reboot
Using what is called an SSH login, trackers were set up to
be controllable remotely (although this required the volunteer’s router to be
set up properly). This meant that both the Raspberry Pi software and the
tracker software could be updated when necessary.
4.1.5
Data Capture
Essentially, all the data that was needed was collected by
the trackers – except for one thing – a count of the number of observed
trails! The original intention was then to review photos taken by each tracker
and count any trails that appeared in each image, noting the time of the
appearance of trails, when a particular trail or trails appeared on more than 2
consecutive images.
4.1.6
Need for Time-lapse Video
When the trail-counting started in earnest, it was
realized that it was very time-consuming to inspect individual images for
trails – even using something like Google Picasa image viewer – which has a
very fast/responsive image viewer. Therefore, scripts were added to the
raspberry Pi software to generate time-lapse MP4 movies as soon as the tracker
stopped taking photographs at dusk.
As time-lapse videos were reviewed, another problem became
apparent – in the UK, where all the trackers are situated, days where the sky
is completely free of cloud for more than a few hours are rare. A whole day
could be reviewed and there were no usable sky images at all – as the weather
was too cloudy to observe trails. A method had to be devised, therefore to
measure how “clear” (blue) the sky was – which allowed a determination of how
usable the image was. A software package called “Imagemagick” (which was used
to add timestamp text to images and make a composite image with the plane chart
and weather icon) was therefore used to analyse each sky image, immediately
after it was captured, to determine the “blueness”. This was calculated as a number
which ranged from about -85 to +250. Following some tests, it was determined
that in most cases, images that had “blueness values” of greater than about 50
could be used to look for trails.
4.2
Microsoft Access Database
Initially, use of OpenOffice “Base” was tried, but
difficulty was encountered in importing the data efficiently and successfully,
but more success was achieved more quickly with Microsoft (Access 2003).
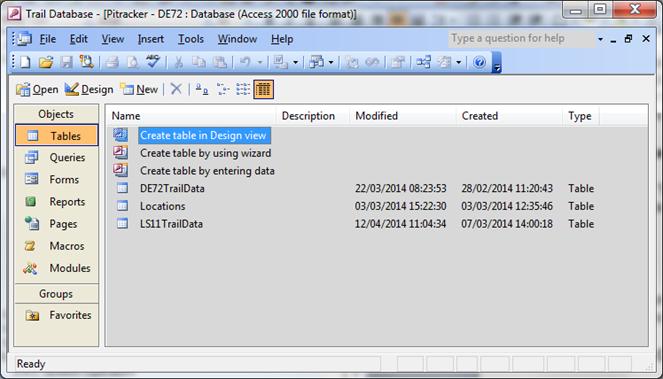
Microsoft Access
Database Tables
4.2.1
Importing Data
Daily Data (CSV) files from each of the trackers were
merged together every few days or weeks and imported into a “holding” table. (Some
of the earlier weeks of data had to be reformatted as additional data columns,
such as the sky blueness measurements were added to the tracker after a few
weeks of data had already been collected. “Blueness” data was then generated
from the time-lapse videos from those early weeks and added to the database
retrospectively.)
4.2.2
Database Queries
SQL Queries were developed to sort and group data by
location, date and time. This data could then be presented on forms for
inspection and modification. For example, a “notes” field was included so that
any unusual trails or weather effects could be noted while sky images were
reviewed.
4.2.3
Counting Trails – Entering Data into the Database
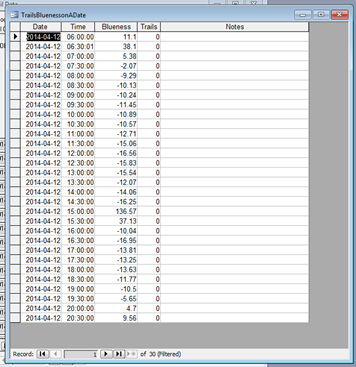
Once data was imported into the database, a query could be
run to determine if there were any periods in each day when the sky was clear
enough (based on the “Sky Blueness factor” – see section 4.1.7) for trails to
be observed. A form was developed which allowed trail counts to be entered for
the times that the sky was clear enough to see them. i.e. the query would
“filter out” any days where there were no periods clear enough to see trails,
which saved some time during reviewing time-lapse video. It was also noticed
that the “blueness factor” was generally a fairly good indication of when
trails would be visible, although for example, if the Pi camera was pointing at
the sun, and there was some haze in the sky, the image would not appear to have
much blueness, but it was still possible to see some trails. So the blueness
factor calculation was not always reliable. (Data between about September and
November 2013 was inspected by volunteers and trail counts were added by them –
this data was imported into the database too).
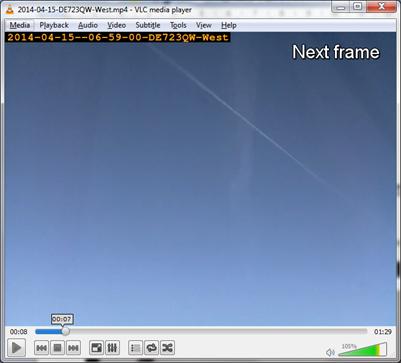
The time-lapse video was reviewed in VLC Player –
which has the ability to step through 1 frame at a time (by pressing the E key).
This allowed closer examination of some video frames for some sections of each
video.
|
|
|
|
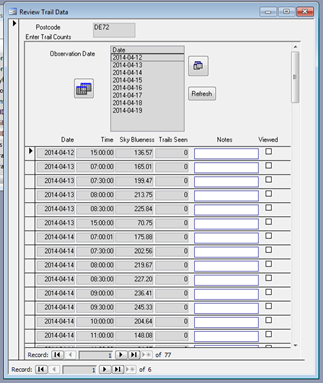
MS-Access
2003 Form which lists days where there were clear periods.
|
Form
used to enter trail counts in each half-hourly period during daylight.
|
|
|
|
VLC
Player used to review Time-lapse videos.
|
4.3
Some Trackers Ran Longer than Others…
As of the date of compiling this report, 3 trackers have
been running on most days – and 2 have been running every day. 3 of the
original trackers stopped running and volunteers, for various reasons were not
able to re-start them. Hence, for 3 trackers, there is not as much usable data.
It is hoped, however, that these trackers ran for long enough that the average
counts of aircraft etc, at least, are usable in some way.
In this section we consider how data requirements were
determined and how the data was analysed after it had been acquired.
5.1
Data Requirements
In this section, we consider what counts were needed to
make determinations about trailing patterns.
5.1.1
Counting Detected Aircraft
When the software detected a “new” aircraft, it was
counted. Once it had been detected, it was assumed it could remain in range for
90 seconds and therefore it would not be “re-counted” if the tracker temporarily
lost the signal from the aircraft (for less than 90 seconds). If the same
aircraft was detected by the tracker at periods greater than 90 seconds apart,
it would be counted twice.
5.1.2
Aircraft Broadcasting Their Location
Even when originally using the Airnav Radar Box, it was
discovered that only a certain proportion of aircraft seemed to be broadcasting
their location data (latitude/longitude). Nearly all would broadcast their
altitude and call sign.
5.1.3
Military Flights
These were identified based on data in the Database
mentioned in Section 3.3.5 and it seemed none of these flights broadcast their
location. However, it was at least possible to count them.
5.1.4
Aircraft Altitude
The Tracker software was designed to allow aircraft in
certain altitude bands to be counted and these counts were stored separately
and also, total counts of aircraft detected above the base altitude were
stored. It was assumed that aircraft at or above 25,000 feet had the
potential to form trails and aircraft below this altitude should not form
trails.
5.1.5
Aircraft Range
Depending on where the tracker was sited, it could detect
aircraft over 100 miles away. For the purposes of this study, it was considered
that an aircraft within 25 miles of the tracker could be seen if it was leaving
some type of trail. When the data was analysed, this figure did not seem
unreasonable.
5.1.6
“Above Base and In Range”
Hence, most of the counts and figures were considered with
regard to the assumption that for a trail to be viewed, an aircraft would have
to be in range of the tracker and above the base altitude for forming a trail.
A count was therefore kept of aircraft that fulfilled both these criteria.
5.1.7
Main Counts To Be Determined
Taking the factors/assumptions in this section as a whole,
the main objective was therefore to try and establish if the following average
counts differed on days and/or during periods when trailing was observed
compared to days/times when no trailing was observed.
·
Count of Planes Detected
·
Count of Planes Located (those which had latitude and longitude)
·
Count of Planes Above Trail Altitude
·
Count of Planes which came within 25 Miles of the tracker’s
location
·
Count of Planes Above Trail Altitude and within 25 Miles of the
tracker’s location
This also necessitated that the “blueness factor” (see
section 4.1.7) was used to determine periods of clear skies, so that a fair
comparison of figures could be attempted.
5.1.8
Trail Count Considerations – Camera Field of View
The Raspberry Pi camera has a 49 degree horizontal field
of view and a 37 degree vertical field of view.
This means that it can only capture about one eighth of the horizontal view and
about one fifth of the vertical field of view. This therefore means that trails
may have appeared on some days, but not been picked up on any time-lapse
videos. Conversely, it means that it is possible that on days when light
trailing was seen, there may have been many more trails than indicated
in the counts entered into the database.
5.2
General Assumptions
In this section, we consider assumptions made in trying to
analyse the data.
5.2.1
Weekly Air Traffic Patterns
It is generally assumed that air traffic over the locations
where trackers were cited followed a weekly cycle – and it was mainly civilian
in nature. That is, the volume of air traffic on every Monday would be roughly
the same and, the volume of air traffic on every Tuesday would be roughly the
same etc.
5.2.2
Counts of Detected Aircraft and Those Coming Into Range of The Tracker
The trackers were kept in the same physical location
during the time they were running – this was important because if they were
moved, say, from an upstairs room to a downstairs room, an immediate effect on
the ability of the trackers to detect aircraft could be observed. Also, with
repeated observation, it could be seen that a tracker may detect aircraft at a
greater range in one direction (e.g. looking towards the South West). This was
likely to be a result of a clear line-of-sight view to the horizon in this direction.
That is, a signal from the aircraft is impeded by buildings, trees etc in
between the tracker and the aircraft. However, this should be less of an issue
for aircraft that came into the range where trails were to be observed, because
the signal would be stronger when the aircraft was nearer to the tracker.)
5.2.3
Daily Count Totals
It was necessary to develop an easy method to sum all the
required counts from all the half-hourly periods for which the tracker logged
counts – this is discussed further in the section on how database queries were
used to collate results.
In this section we discuss some details of how the database
was structured and also the queries that were developed to process and analyse
the data.
6.1
Main Table
When all the data was imported from the trackers, it ended
up in a Database table – part of which is shown below. This allowed the data to
be filtered, processed, averaged etc in a variety of ways, using queries.
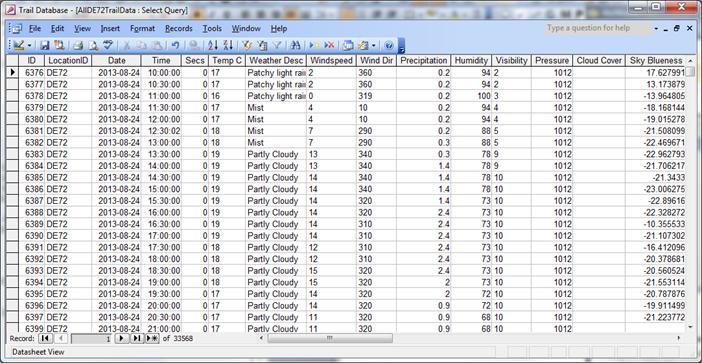
Partial Datasheet
view of Main Database Table
6.2
Statistical Considerations
The author freely admits that the way the results have
been generated may not be the most appropriate or accurate. It is quite
possible that using methods involving variance and standard deviations may have
been more usual and more accurate.
As it was, the general approach was simply to try and
produce average figures for counts over a period of weeks and then compare
these averages on days of trailing and no trailing.
Anyone who is interested in generating results, based on
different methods, is welcome to contact the author for a copy of the database
or some version of it, for example, converted into Microsoft Excel format.
6.3
Database Query Development
Essentially, queries were developed for 2 purposes:
·
To facilitate database table building (i.e. copy data from a
holding/import table into one main table of data)
·
To generate and calculate average figures by several methods.
This was a somewhat complicated task – because first,
half-hourly observations had to be collated and then summed to give daily
figures. Additionally, it was necessary to consider weekday averages, as it was
seen there is generally less detected air traffic at the weekend than during
the week.
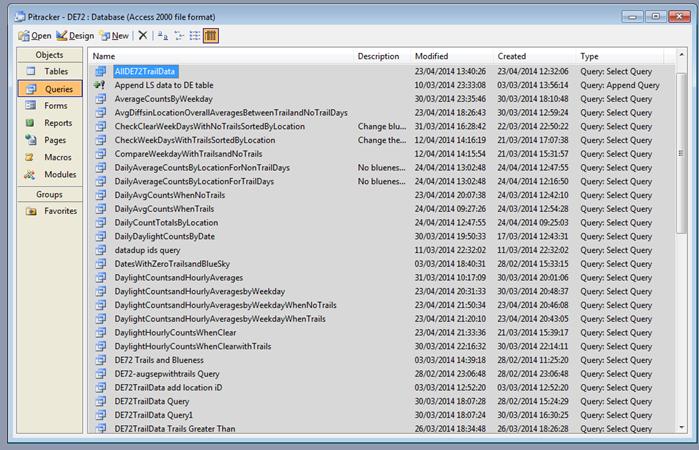
A view of Some of
Database Queries Developed
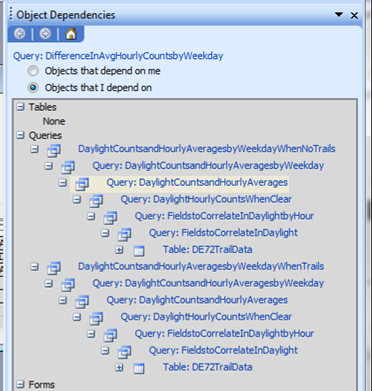
6.3.1
Query Dependency
One feature in the Access Database Package allows one to
show the dependency of one query on another. Below, we can see the “path” of
the query as outlined in sections 6.6.1 to 6.6.4:
6.4
Comparisons Taking into Account Clear Skies (Blueness Factor)
Queries needed to take into account whether the sky was
clear or not, so that a fair comparison could be drawn. This was achieved by
considering the blueness factor – as discussed in section 4.1.7, “blueness
factors” of greater than about 50 would indicate clear enough skies for trails
to be seen, so this figure was generally used as a “baseline” for comparisons.
6.5
Comparisons Using Overall Average Counts
Several queries were developed which did not take account
of the sky blueness factor – they simply averaged out figures for days where
trails were recorded compared to days where no trails were recorded.
If it was true that, as some people claimed, chemtrails
were the result of clandestine spraying by the military or some other group, it
was considered that this figure might give some indication of this. The logic
behind this consideration is that “clandestine flights” would be less likely to
broadcast their position in ADS-B messages, so during hours or days of
trailing, the proportion of aircraft that were not broadcasting their
position should increase.
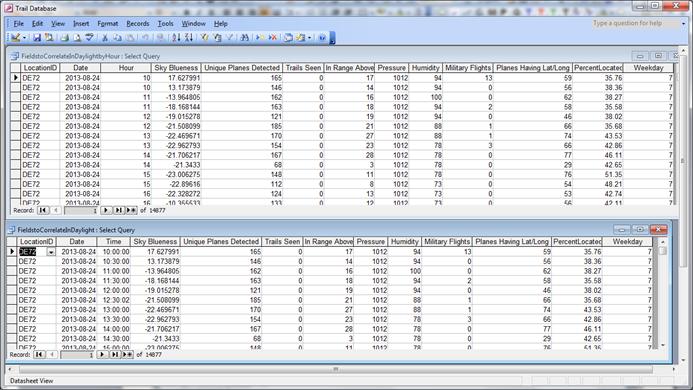
6.6.2
Selecting Records for Daylight Hours
2 Queries were made initially - “FieldstoCorrelateInDaylight”
and “FieldstoCorrelateInDaylightbyHour”. These selected fields and collated
hourly results, while generating a “weekday” field for the date in question.
These queries checked for a non-zero blueness factor, which meant only records
that were generated in daylight hours were selected and used in calculations.
Two further queries
were next created - “Week Day Hourly Counts When Trails” and “Week Day Hourly
Counts When No Trails.”
These summed records from the
“FieldstoCorrelateInDaylightbyHour” query to give figures for each weekday
from the sets of records for each location:

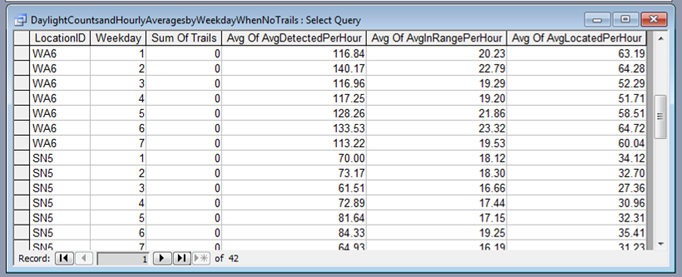
Next, queries were generated to calculate average daylight
hourly counts for days when trails were seen and days when no trails were seen.
These checked the “Blueness factor” in each record for the periods of trailing
that was greater than 0. (The logic being that all records where trails were
actually noted would probably have a value greater than 0.)

Another query was generated called “DifferenceInAvgHourlyCountsbyWeekday”
– this subtracted the values calculated in the queries in section 6.6.4. In
this query, the average value calculated on a weekday with trails was
subtracted from the same value for the average value for a weekday when
no trails were observed. Here we see one portion of the query for calculating the
difference in the “Average Number Detected” (per hour) value:
DaylightCountsandHourlyAveragesbyWeekdayWhenNoTrails.[Avg
Of AvgDetectedPerHour] - DaylightCountsandHourlyAveragesbyWeekdayWhenTrails.[Avg
Of AvgDetectedPerHour] AS [Diff Avg Detected]
The results of this query are discussed in section 7.4.
6.7
Overall Daily Average Counts – Ignoring Blueness of Sky
In an attempt remove any bias caused by use of the
blueness calculation, a simpler set of queries were generated to calculate
overall daily average counts for days of trailing and no trailing, thus:
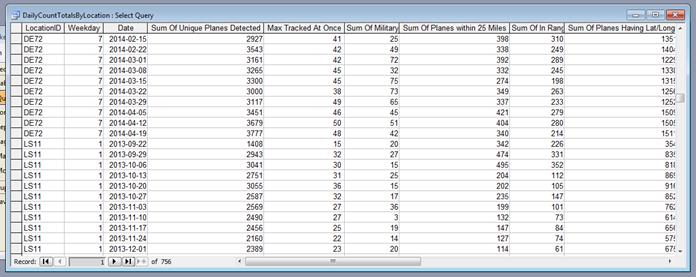
6.7.1
Daily Counts – with Weekday
These were calculated by a query called
“DailyCountTotalsByLocation”
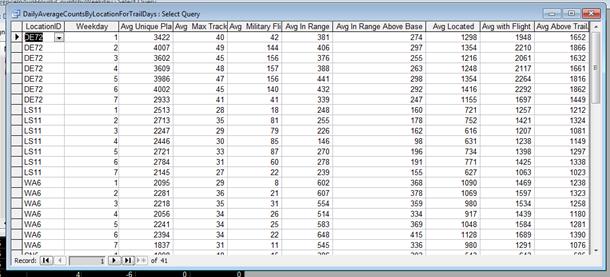
6.7.2
Average of Counts for a Weekday - for Trailing Days and Non-Trailing
Days
In the same way as is shown
in section 6.6.3 and 6.6.4, queries were generated to average counts on
trailing and non-trailing days – “Daily Average Counts By Location For Trail Days”
and “Daily Average Counts By Location For Non Trail Days”

6.7.3
Difference in Daily Counts for Trailing Days and Non-Trailing Days
This query subtracted results
from the previous 2 queries. Here, we can see one part of the query to
calculate the difference in average detected plane counts.
[DailyAverageCountsByLocationForNonTrailDays].[Avg
Detected] - [DailyAverageCountsByLocationForTrailDays].[Avg
Unique Planes Detected]
The results of this query are shown in section 7.5.
6.8
Number of Days Trails Were Observed On
Another query “NoLocationsSeeingTrails on a Date” was
developed to determine how many locations saw trailing on the same day, and how
many days trails were observed on. This result is shown in section 7.6.
6.9
Maximum Trails Seen on One Day
A query called “Total Trails on Date” to calculate the
number of trails seen on the dates which was sorted by location. It must be
noted that not every tracker was running on every day. This could then be further
sorted, in descending order, to show which days had the most trails observed. These
results are shown in section 7.7.
6.10
Days with High Numbers of Trails and Days with
High Numbers of Detected Aircraft
One of the main areas of interest was to
try and find out if there was any correspondence between high numbers of
aircraft being detected (and/or coming into visible range of the tracker) and
high numbers of trails being counted. The “Total Trails on Date” query could
also be sorted by location and “Detected Aircraft Count”. This allowed a basic
comparison to be made. These results are shown in section 7.8.
6.11
Weather Anomalies
Another observation on some of the time lapse video
footage were apparent weather anomalies, which are discussed in section 7.9.
6.12
Identification of Flights Leaving Trails
Another goal was to try and identify, from the time lapse
video and charts which were generated, which flights were creating trails. (In
2010, I had done this on only 2 occasions using the Airnav Radarbox).
These new results are shown in section 7.9.
This section shows the results of the queries developed and
described in section 6. In the data shown, Weekday 1 is Sunday and Weekday 7 is
Saturday.
7.1
Amount of Data Collected from Each Tracker
The table below shows the approximate
number of days of data collected from each tracker (up to 22 Apr 2014)
|
Location
|
CountOfDate
|
|
DE72
|
228
|
|
LS11
|
102
|
|
WA6
|
162
|
|
SN5
|
106
|
|
NE16
|
89
|
|
PO33
|
45
|
7.2
Note about Percentage of Aircraft Located Figure
If clandestine planes are operating – broadcasting only
their altitude or their ID, then the percentage located figure may decrease. As
can be seen if all the data is studied, the “percentage located” figure varied
between about 30% of aircraft and 50% - depending largely, it seemed, on the
total number of aircraft detected rather than anything else. However, there
could be a number of reasons for the variability in this figure.
7.3
Note about Daily Average Counts for Weekdays and
Weekends
It was noted that the average counts of
detected aircraft showed little variation on Mondays-Fridays and were most
usually reduced on a Saturday and Slightly reduced (compared to weekday counts)
on a Sunday. This can be seen in a Snapshot from 02 May from the WA6 and DE72
Trackers
|
Day
|
Found
|
With Lat Long
|
With Flt Num
|
In Range
|
Above Base
|
In Range Above
Base
|
Military
|
Max At Once
|
% Located
|
|
Thu
|
4565
|
1814
|
2635
|
539
|
2407
|
390
|
101
|
53
|
39.7
|
|
Wed
|
4826
|
1749
|
2689
|
522
|
2269
|
332
|
120
|
45
|
36.2
|
|
Tue
|
4556
|
1615
|
2506
|
351
|
2283
|
277
|
143
|
46
|
35.4
|
|
Mon
|
4355
|
1672
|
2492
|
433
|
2241
|
281
|
130
|
55
|
38.4
|
|
Sun
|
4074
|
1675
|
2297
|
475
|
2100
|
331
|
42
|
45
|
41.1
|
|
Sat
|
3647
|
1549
|
2123
|
462
|
1884
|
315
|
27
|
48
|
42.5
|
|
Fri
|
4360
|
1798
|
2574
|
496
|
2308
|
324
|
62
|
53
|
41.2
|
DE72 – 02 May 2013 - 7
Days of Stats on Flights Detected
|
Day
|
Found
|
With Lat Long
|
With Flt Num
|
In Range
|
Above Base
|
In Range Above
Base
|
Military
|
Max At Once
|
% Located
|
|
Thu
|
2608
|
1267
|
1829
|
746
|
1428
|
461
|
20
|
42
|
48.6
|
|
Wed
|
2428
|
1158
|
1697
|
671
|
1369
|
422
|
22
|
32
|
47.7
|
|
Tue
|
2586
|
1175
|
1714
|
702
|
1391
|
442
|
26
|
38
|
45.4
|
|
Mon
|
2585
|
1230
|
1787
|
745
|
1371
|
478
|
28
|
41
|
47.6
|
|
Sun
|
2360
|
1252
|
1655
|
706
|
1346
|
449
|
14
|
32
|
53.1
|
|
Sat
|
1998
|
1133
|
1435
|
638
|
1202
|
416
|
13
|
35
|
56.7
|
|
Fri
|
2648
|
1298
|
1861
|
742
|
1436
|
462
|
21
|
39
|
49
|
WA6 - 02 May
2013 - Last 7 Days of Stats on Flights Detected
The results are shown in
table form, rather than as a screen capture.
7.4.1
Diff Avg Detected Figure
This
figure is the difference in the average number of planes detected per hour,
calculated by subtracting the average number of planes detected during daylight hours on days of some
trailing from the average number of planes per hour detected during
daylight hours on days of no trailing.
|
DifferenceInAvgHourlyCountsbyWeekday
|
|
Location
|
Weekday
|
Diff Avg Detected
|
Diff Avg in Range
|
Diff Avg Located
|
|
DE72
|
1
|
-5.80
|
0.60
|
1.70
|
|
DE72
|
2
|
-5.90
|
-0.30
|
0.20
|
|
DE72
|
3
|
-6.30
|
0.20
|
0.20
|
|
DE72
|
4
|
-11.40
|
-0.20
|
-2.20
|
|
DE72
|
5
|
-5.10
|
0.00
|
0.40
|
|
DE72
|
6
|
-10.50
|
0.20
|
-0.80
|
|
DE72
|
7
|
0.70
|
0.20
|
1.00
|
|
LS11
|
1
|
1.30
|
-1.30
|
2.10
|
|
LS11
|
2
|
-11.00
|
-0.90
|
-2.80
|
|
LS11
|
3
|
1.40
|
-1.50
|
-0.20
|
|
LS11
|
4
|
-16.20
|
-0.10
|
-3.60
|
|
LS11
|
5
|
-7.70
|
-1.50
|
-2.20
|
|
LS11
|
6
|
-16.30
|
-1.10
|
-2.00
|
|
LS11
|
7
|
1.50
|
-2.30
|
0.00
|
|
WA6
|
1
|
-0.50
|
-0.30
|
0.80
|
|
WA6
|
2
|
2.50
|
0.30
|
1.30
|
|
WA6
|
3
|
-3.30
|
-0.50
|
-1.10
|
|
WA6
|
4
|
0.10
|
0.10
|
0.20
|
|
WA6
|
5
|
1.90
|
0.50
|
0.50
|
|
WA6
|
6
|
-0.90
|
-0.10
|
0.70
|
|
WA6
|
7
|
-2.30
|
-0.80
|
-0.60
|
|
SN5
|
1
|
0.80
|
-0.10
|
0.60
|
|
SN5
|
2
|
1.80
|
0.10
|
0.40
|
|
SN5
|
3
|
-5.40
|
-0.10
|
-1.60
|
|
SN5
|
4
|
-6.00
|
-0.10
|
-0.50
|
|
SN5
|
5
|
4.20
|
-0.10
|
0.40
|
|
SN5
|
6
|
-0.50
|
0.60
|
0.70
|
|
SN5
|
7
|
-7.10
|
-0.80
|
-1.20
|
|
NE16
|
1
|
-0.40
|
-0.20
|
0.00
|
|
NE16
|
2
|
7.80
|
0.80
|
4.40
|
|
NE16
|
3
|
-0.50
|
-0.10
|
0.10
|
|
NE16
|
4
|
-1.50
|
-0.20
|
-1.10
|
|
NE16
|
5
|
-4.20
|
-0.20
|
-1.00
|
|
NE16
|
6
|
-0.80
|
-0.60
|
-0.70
|
|
NE16
|
7
|
6.00
|
0.60
|
3.40
|
|
PO33
|
1
|
-5.70
|
-2.30
|
-4.10
|
|
PO33
|
2
|
0.30
|
-0.50
|
0.80
|
|
PO33
|
4
|
-4.20
|
0.60
|
0.70
|
|
PO33
|
5
|
1.30
|
0.20
|
1.20
|
|
PO33
|
6
|
-2.90
|
-1.20
|
-0.10
|
|
PO33
|
7
|
6.40
|
0.70
|
4.50
|
As can be seen, these differences in the hourly averages
are small. For the DE72 Tracker, which had collected the most data, the data
was the most consistent, showing a slightly higher detected number on trailing
days, but no real difference in the average detected coming into range of the
tracker.
For the other trackers, the picture is more mixed – the WA6
tracker, which had about 70% the amount of captured data as the DE72 tracker,
there was very little overall detectable difference in average hourly traffic
on “trailing” and “non-trailing” days.
Re-running the query with a
negative blueness factor (e.g. -2) made some of the differences smaller, for
those stations which had more data:
|
DifferenceInAvgHourlyCountsbyWeekday
|
|
Location
|
Weekday
|
Diff Avg Detected
|
Diff Avg in Range
|
Diff Avg Located
|
|
DE72
|
1
|
-2.10
|
0.60
|
0.80
|
|
DE72
|
2
|
-3.10
|
-0.20
|
0.20
|
|
DE72
|
3
|
1.40
|
0.70
|
1.80
|
|
DE72
|
4
|
-5.90
|
0.00
|
-0.90
|
|
DE72
|
5
|
0.10
|
0.20
|
1.10
|
|
DE72
|
6
|
-0.40
|
0.90
|
1.30
|
|
DE72
|
7
|
-0.10
|
-0.20
|
0.80
|
|
LS11
|
1
|
-1.70
|
-1.70
|
0.80
|
|
LS11
|
2
|
-20.80
|
-2.00
|
-4.50
|
|
LS11
|
3
|
4.50
|
-1.50
|
0.50
|
|
LS11
|
4
|
-23.10
|
0.10
|
-4.90
|
|
LS11
|
5
|
-5.20
|
-1.20
|
-1.80
|
|
LS11
|
6
|
-15.80
|
-0.30
|
-3.00
|
|
LS11
|
7
|
10.10
|
-2.20
|
2.20
|
|
WA6
|
1
|
-2.50
|
-0.40
|
0.20
|
|
WA6
|
2
|
4.10
|
0.70
|
1.80
|
|
WA6
|
3
|
-3.50
|
-0.20
|
-1.10
|
|
WA6
|
4
|
0.90
|
0.40
|
0.80
|
|
WA6
|
5
|
-2.20
|
0.00
|
-1.00
|
|
WA6
|
6
|
0.00
|
0.00
|
-0.30
|
|
WA6
|
7
|
-4.20
|
-1.10
|
-1.60
|
|
SN5
|
1
|
1.90
|
0.10
|
0.90
|
|
SN5
|
2
|
1.60
|
-0.60
|
0.00
|
|
SN5
|
3
|
-3.80
|
-0.30
|
-1.40
|
|
SN5
|
4
|
-5.90
|
-0.20
|
-0.10
|
|
SN5
|
5
|
3.60
|
-0.40
|
0.30
|
|
SN5
|
6
|
-3.70
|
-0.20
|
-0.70
|
|
SN5
|
7
|
-5.70
|
-0.60
|
-1.00
|
|
NE16
|
1
|
-2.90
|
-0.40
|
-1.00
|
|
NE16
|
2
|
-1.30
|
-0.90
|
2.10
|
|
NE16
|
3
|
0.40
|
-0.10
|
0.10
|
|
NE16
|
4
|
-1.80
|
-0.30
|
-1.00
|
|
NE16
|
5
|
-3.40
|
-0.20
|
-0.70
|
|
NE16
|
6
|
-2.40
|
-0.70
|
-1.60
|
|
NE16
|
7
|
5.70
|
0.20
|
3.10
|
|
PO33
|
1
|
-3.70
|
-2.50
|
-2.70
|
|
PO33
|
2
|
-1.10
|
-0.80
|
-0.60
|
|
PO33
|
4
|
-5.40
|
0.70
|
1.50
|
|
PO33
|
5
|
-4.60
|
-0.50
|
-2.10
|
|
PO33
|
6
|
-14.00
|
-3.80
|
-7.10
|
|
PO33
|
7
|
2.10
|
1.40
|
4.00
|
This table
shows the results for daily (rather than hourly) average counts on days of
trailing and when no trailing was recorded (but the blueness factor is not
taken into account).
|
DiffDailyAvgCountsbyWeekDayLocation
|
|
Location
|
Weekday
|
Diff Detected
|
Diff Max Tracked
|
Diff Military Flights
|
Diff In Range
|
Diff In Range Above Base
|
Diff Avg Located
|
Diff Avg with Flight No
|
Diff Avg Above TrailAlt
|
|
DE72
|
1
|
-243.00
|
-2.00
|
-15.00
|
2.00
|
9.00
|
13.00
|
-99.00
|
27.00
|
|
DE72
|
2
|
-393.00
|
-3.00
|
-41.00
|
-7.00
|
-10.00
|
-21.00
|
-107.00
|
-107.00
|
|
DE72
|
3
|
-202.00
|
-1.00
|
-22.00
|
9.00
|
8.00
|
4.00
|
-44.00
|
-39.00
|
|
DE72
|
4
|
-542.00
|
-8.00
|
-50.00
|
-43.00
|
-24.00
|
-154.00
|
-317.00
|
-238.00
|
|
DE72
|
5
|
-442.00
|
-3.00
|
-36.00
|
-36.00
|
-20.00
|
-63.00
|
-173.00
|
-124.00
|
|
DE72
|
6
|
-376.00
|
-2.00
|
-40.00
|
1.00
|
8.00
|
-40.00
|
-135.00
|
-109.00
|
|
DE72
|
7
|
132.00
|
0.00
|
3.00
|
45.00
|
16.00
|
74.00
|
69.00
|
60.00
|
|
LS11
|
1
|
-150.00
|
-2.00
|
2.00
|
-67.00
|
-51.00
|
-25.00
|
-70.00
|
-38.00
|
|
LS11
|
2
|
-259.00
|
-3.00
|
-17.00
|
-31.00
|
-34.00
|
-90.00
|
-150.00
|
-159.00
|
|
LS11
|
3
|
440.00
|
3.00
|
32.00
|
-13.00
|
-17.00
|
68.00
|
185.00
|
170.00
|
|
LS11
|
4
|
-32.00
|
0.00
|
-13.00
|
51.00
|
44.00
|
2.00
|
23.00
|
8.00
|
|
LS11
|
5
|
91.00
|
1.00
|
-10.00
|
-59.00
|
-58.00
|
21.00
|
65.00
|
26.00
|
|
LS11
|
6
|
-272.00
|
0.00
|
5.00
|
-102.00
|
-82.00
|
-21.00
|
-85.00
|
-91.00
|
|
LS11
|
7
|
-298.00
|
0.00
|
-1.00
|
-104.00
|
-74.00
|
-75.00
|
-152.00
|
-119.00
|
|
WA6
|
1
|
-3.00
|
0.00
|
0.00
|
0.00
|
-10.00
|
39.00
|
38.00
|
7.00
|
|
WA6
|
2
|
32.00
|
2.00
|
7.00
|
11.00
|
3.00
|
26.00
|
42.00
|
9.00
|
|
WA6
|
3
|
-184.00
|
-2.00
|
-7.00
|
-31.00
|
-25.00
|
-52.00
|
-96.00
|
-89.00
|
|
WA6
|
4
|
19.00
|
-1.00
|
-2.00
|
2.00
|
6.00
|
23.00
|
31.00
|
35.00
|
|
WA6
|
5
|
-101.00
|
1.00
|
3.00
|
-30.00
|
-12.00
|
-64.00
|
-67.00
|
-55.00
|
|
WA6
|
6
|
-40.00
|
-1.00
|
3.00
|
1.00
|
-8.00
|
35.00
|
13.00
|
-15.00
|
|
WA6
|
7
|
0.00
|
-3.00
|
0.00
|
-6.00
|
-13.00
|
20.00
|
29.00
|
15.00
|
|
SN5
|
1
|
19.00
|
1.00
|
0.00
|
-33.00
|
-12.00
|
9.00
|
7.00
|
59.00
|
|
SN5
|
2
|
113.00
|
1.00
|
20.00
|
16.00
|
6.00
|
19.00
|
40.00
|
34.00
|
|
SN5
|
3
|
-397.00
|
-3.00
|
-10.00
|
-76.00
|
-85.00
|
-171.00
|
-230.00
|
-225.00
|
|
SN5
|
4
|
-316.00
|
-5.00
|
-10.00
|
-41.00
|
-50.00
|
-83.00
|
-157.00
|
-155.00
|
|
SN5
|
5
|
-160.00
|
1.00
|
8.00
|
-93.00
|
-73.00
|
-119.00
|
-114.00
|
-119.00
|
|
SN5
|
6
|
-71.00
|
0.00
|
-11.00
|
-13.00
|
4.00
|
3.00
|
-23.00
|
-5.00
|
|
SN5
|
7
|
-128.00
|
-3.00
|
-7.00
|
35.00
|
9.00
|
6.00
|
-23.00
|
-13.00
|
|
NE16
|
1
|
-31.00
|
0.00
|
7.00
|
-8.00
|
-5.00
|
-7.00
|
-41.00
|
-31.00
|
|
NE16
|
2
|
-131.00
|
5.00
|
-32.00
|
-25.00
|
-6.00
|
-23.00
|
-91.00
|
-39.00
|
|
NE16
|
3
|
111.00
|
4.00
|
-12.00
|
9.00
|
7.00
|
64.00
|
138.00
|
50.00
|
|
NE16
|
4
|
-47.00
|
-3.00
|
1.00
|
-7.00
|
-6.00
|
-43.00
|
-48.00
|
-73.00
|
|
NE16
|
5
|
-377.00
|
-10.00
|
-17.00
|
-37.00
|
-20.00
|
-113.00
|
-303.00
|
-122.00
|
|
NE16
|
6
|
32.00
|
2.00
|
-18.00
|
-32.00
|
-18.00
|
2.00
|
27.00
|
0.00
|
|
NE16
|
7
|
154.00
|
6.00
|
13.00
|
32.00
|
19.00
|
99.00
|
150.00
|
111.00
|
|
PO33
|
1
|
-227.00
|
-3.00
|
0.00
|
-111.00
|
-83.00
|
-178.00
|
-161.00
|
-160.00
|
|
PO33
|
2
|
1.00
|
0.00
|
1.00
|
-14.00
|
-16.00
|
17.00
|
-9.00
|
38.00
|
|
PO33
|
4
|
37.00
|
-1.00
|
-8.00
|
48.00
|
20.00
|
92.00
|
18.00
|
72.00
|
|
PO33
|
5
|
56.00
|
0.00
|
-2.00
|
1.00
|
-2.00
|
46.00
|
51.00
|
56.00
|
|
PO33
|
6
|
-404.00
|
-4.00
|
-2.00
|
-82.00
|
-63.00
|
-185.00
|
-259.00
|
-158.00
|
|
PO33
|
7
|
-187.00
|
-3.00
|
1.00
|
-70.00
|
-49.00
|
-100.00
|
-158.00
|
-87.00
|
On first looks, it appears that, overall and on a number
of weekdays, more flights are detected on days with trails – as we get negative
figures when we subtract the trailing days’ figures from the non-trailing days.
However, the picture is not consistent, yet it does not seem completely random
either.
Between 28 Aug 2013 and 22
Apr 2014, trails were observed in 1 or more locations on 161 days from about 233
Days across 6 locations. The table below shows the dates where the most numbers
of trails were seen – totalled together from all 6 locations.
|
NoLocationsSeeingTrails on a Date
|
|
Date
|
Num Locatoions
|
SumOfTrails Seen
|
|
2013-11-30
|
6
|
165
|
|
2013-11-25
|
5
|
143
|
|
2013-11-10
|
6
|
135
|
|
2013-12-06
|
6
|
106
|
It was often the case that trailing
was seen in more than 1 location on the same day, when more than 1 tracker was
running on that day. This table shows how many days trails were seen at
different locations:
|
Num Locations
|
Count Of
NoLocationsSeeingTrails on Same Date
|
% of Total Days
|
|
1
|
16
|
10%
|
|
2
|
37
|
23%
|
|
3
|
43
|
27%
|
|
4
|
24
|
15%
|
|
5
|
11
|
7%
|
|
6
|
30
|
19%
|
So, trails were most commonly seen in 3 locations – but this
would of course be dependent on which trackers were running.
The maximum number of trails counted in a single day was
from the WA6 tracker – 91 trails on 25-11-2013. A few of the other “high trail
count days” are shown below.
|
Location
|
Date
|
Weekday
|
Trails Seen
|
Detected
|
Max Tracked
|
Military
|
InRange
|
LatLong
|
Percent Located
|
|
WA6
|
2013-11-25
|
2
|
91
|
2321
|
41
|
41
|
360
|
1018
|
43.86
|
|
WA6
|
2013-11-30
|
7
|
79
|
1635
|
29
|
4
|
345
|
867
|
53.03
|
|
NE16
|
2013-12-16
|
2
|
51
|
1131
|
19
|
69
|
103
|
450
|
39.79
|
|
DE72
|
2014-04-11
|
6
|
45
|
4308
|
49
|
160
|
284
|
1597
|
37.07
|
|
LS11
|
2013-10-06
|
1
|
44
|
3041
|
30
|
15
|
352
|
818
|
26.90
|
|
LS11
|
2013-11-25
|
2
|
42
|
2512
|
36
|
108
|
78
|
598
|
23.81
|
|
SN5
|
2013-11-10
|
1
|
42
|
646
|
13
|
14
|
257
|
386
|
59.75
|
|
WA6
|
2013-11-13
|
4
|
41
|
2185
|
37
|
34
|
353
|
935
|
42.79
|
|
DE72
|
2013-12-06
|
6
|
40
|
3695
|
42
|
166
|
209
|
1222
|
33.07
|
|
DE72
|
2013-11-07
|
5
|
39
|
3359
|
43
|
175
|
302
|
1089
|
32.42
|
|
WA6
|
2014-04-11
|
6
|
39
|
2500
|
34
|
16
|
441
|
1173
|
46.92
|
In this section we look at the counts for
days where the highest number of trails were observed at each location.
The counts are then compared to days
where no trails were observed, but high counts of planes detected and/or planes
coming into range (and above the base altitude) were observed. This was done
using a version of the “DailyCountTotalsByLocation” query (with a check on
Average Blueness being > 20) and a Trail Count of zero.
7.8.1
DE72 High Trailing on 06 Dec 2013 and 11 Apr 2014
From these figures, we can see that the days with the
highest recorded number of trails seen have lower counts for planes coming into
range and being detected than some days where no trails were seen.
|
Total
Trails on Date Summary (Sorted by Descending Trail Count)
|
|
Location
|
Date
|
Weekday
|
Trails Seen
|
Detected
|
Max Tracked
|
Military
|
InRange
|
Located
|
Percent Located
|
|
DE72
|
2014-04-11
|
6
|
45
|
4308
|
49
|
160
|
284
|
1597
|
37.07
|
|
DE72
|
2013-12-06
|
6
|
40
|
3695
|
42
|
166
|
209
|
1222
|
33.07
|
These
results are for days which were clear enough, but no trails were seen – and we
see the totals are higher.
|
Location
|
Date
|
Weekday
|
Trails Seen
|
Detected
|
Max Tracked
|
Military
|
In Range
|
Located
|
Percent Located
|
|
DE72
|
2013-08-26
|
2
|
0
|
5963
|
48.00
|
59
|
445
|
2147
|
36.0
|
|
DE72
|
2013-09-07
|
7
|
0
|
4336
|
49.00
|
71
|
245
|
1415
|
32.6
|
7.8.2
LS11 Trailing on 6th Oct 2013 and 30th Nov 2013
|
Total
Trails on Date Summary (Sorted by Descending Trail Count)
|
|
Location
|
Date
|
Weekday
|
Trails Seen
|
Detected
|
Max Tracked
|
Military
|
InRange
|
Located
|
Percent Located
|
|
LS11
|
2013-10-06
|
1
|
44
|
3041
|
30
|
15
|
352
|
818
|
26.90
|
|
LS11
|
2013-11-25
|
2
|
42
|
2512
|
36
|
108
|
78
|
598
|
23.81
|
These results are for days
which were clear enough, but no trails were seen – and we see the totals are
higher.
|
Location
|
Date
|
Weekday
|
Trails Seen
|
Detected
|
Max Tracked
|
Military
|
In Range
|
Located
|
Percent Located
|
|
LS11
|
2013-11-04
|
2
|
0
|
3278
|
37
|
104
|
166
|
829
|
25.3
|
|
LS11
|
2013-11-05
|
3
|
0
|
2848
|
30
|
146
|
146
|
734
|
25.8
|
7.8.3
WA6 Trailing on 25th and 30th Nov 2013
|
Total
Trails on Date Summary (Sorted by Descending Trail Count)
|
|
Location
|
Date
|
Weekday
|
Trails Seen
|
Detected
|
Max Tracked
|
Military
|
InRange
|
Located
|
Percent Located
|
|
WA6
|
2013-11-25
|
2
|
91
|
2321
|
41
|
41
|
360
|
1018
|
43.86
|
|
WA6
|
2013-11-30
|
7
|
79
|
1635
|
29
|
4
|
345
|
867
|
53.03
|
These results are for days
which were clear enough, but no trails were seen – and again we see that most
totals are higher.
|
Location
|
Date
|
Weekday
|
Trails Seen
|
Detected
|
Max Tracked
|
Military
|
In Range
|
Located
|
Percent Located
|
|
WA6
|
2013-11-04
|
2
|
0
|
2603
|
46
|
22
|
411
|
1233
|
47.4
|
|
WA6
|
2014-04-07
|
2
|
0
|
2563
|
42
|
27
|
443
|
1182
|
46.1
|
7.8.4
SN5 Trailing on 10th Nov 2013 and 15th Nov 2013
|
Total
Trails on Date Summary (Sorted by Descending Trail Count)
|
|
Location
|
Date
|
Weekday
|
Trails Seen
|
Detected
|
Max Tracked
|
Military
|
InRange
|
Located
|
Percent Located
|
|
SN5
|
2013-11-10
|
1
|
42
|
646
|
13
|
14
|
257
|
386
|
59.75
|
|
SN5
|
2013-11-15
|
6
|
34
|
1122
|
18
|
49
|
255
|
468
|
41.71
|
These results are for days
which were clear enough, but no trails were seen – and we see the totals are
higher.
|
Location
|
Date
|
Weekday
|
Trails Seen
|
Detected
|
Max Tracked
|
Military
|
In Range
|
Located
|
Percent Located
|
|
SN5
|
2013-11-22
|
6
|
0
|
1671
|
26
|
51
|
329
|
620
|
37.1
|
|
SN5
|
2013-12-20
|
6
|
0
|
1611
|
31
|
27
|
392
|
703
|
43.6
|
7.8.5
NE16 Trailing on 14th Dec 2013 and 16th Dec 2013
|
Total
Trails on Date Summary (Sorted by Descending Trail Count)
|
|
Location
|
Date
|
Weekday
|
Trails Seen
|
Detected
|
Max Tracked
|
Military
|
InRange
|
Located
|
Percent Located
|
|
NE16
|
2013-12-16
|
2
|
51
|
1131
|
19
|
69
|
103
|
450
|
39.79
|
|
NE16
|
2013-12-14
|
7
|
17
|
695
|
15
|
10
|
81
|
357
|
51.37
|
These results are for days
which were clear enough, but no trails were seen – and we see the totals are
higher.
|
Location
|
Date
|
Weekday
|
Trails Seen
|
Detected
|
Max Tracked
|
Military
|
In Range
|
Located
|
Percent Located
|
|
NE16
|
2013-10-17
|
5
|
0
|
1775
|
35
|
30
|
75
|
737
|
41.5
|
|
NE16
|
2013-10-31
|
5
|
0
|
1683
|
34
|
58
|
91
|
704
|
41.8
|
7.8.6
PO33 Trailing on 06 Dec 2013 and 30th Nov 2013
|
Total
Trails on Date Summary (Sorted by Descending Trail Count)
|
|
Location
|
Date
|
Weekday
|
Trails Seen
|
Detected
|
Max Tracked
|
Military
|
InRange
|
Located
|
Percent Located
|
|
PO33
|
2013-12-06
|
6
|
17
|
1323
|
26
|
7
|
233
|
731
|
55.25
|
|
PO33
|
2013-11-30
|
7
|
12
|
1150
|
22
|
3
|
213
|
700
|
60.87
|
These results are for days
which were clear enough, but no trails were seen – and we see the totals are
higher.
|
Location
|
Date
|
Weekday
|
Trails Seen
|
Detected
|
Max Tracked
|
Military
|
In Range
|
Located
|
Percent Located
|
|
PO33
|
2013-10-28
|
2
|
0
|
1576
|
24
|
4
|
282
|
950
|
60.3
|
|
PO33
|
2013-10-29
|
3
|
0
|
1504
|
23
|
5
|
287
|
937
|
62.3
|
One intended goal was to be
able to identify any flights that were creating persistent trails. In practice,
it proved quite difficult to achieve this. The table below lists 19 identification
attempts (on 2 days of heavy trailing), of which only 5 were successful. NOTE:
The DE72 Camera was facing almost due West. The WA6 camera was facing
approximately South-South East (not East as might be implied from the incorrect
labelling on the camera images).
|
Date
|
Location
|
Time
of Appearance
|
Identified
As
|
Approx
Direction
|
Notes
|
|
2013-10-06
|
DE72
|
10:42
|
?
|
SE->NW
|
|
|
|
|
11:18
|
?
|
SE->NW
|
|
|
|
|
11:20
|
?
|
SE->NW
|
|
|
|
|
12:22
|
SHT86M
|
SE->NW
|
Probably SHT86M
|
|
|
|
13:22
|
?
|
S->N
|
|
|
|
|
13:26
|
?
|
S->N
or N->S
|
|
|
|
|
13:52
|
?
|
SE->NW
|
|
|
|
|
13:58
|
EXS718N
|
SE->NW
|
|
|
2013-12-06
|
DE72
|
11:01
|
?
|
S->N
or N->S
|
Only a few tracks on this chart…
|
|
|
|
11:32
|
?
|
S->N
or N->S
|
Even Less on this chart!
|
|
|
|
12:44
|
?
|
SE->NW
|
2 parallel trails – neither on chart.
|
|
2013-11-25
|
WA6
|
07:39
|
?
|
N->S
|
|
|
|
|
07:44
|
?
|
N->S
|
|
|
|
|
07:47
|
?
|
SE->NW
|
|
|
|
|
07:57
|
?
|
SE->NW
|
|
|
|
|
09:31
|
?
|
NW->SE
|
|
|
|
|
09:52
|
EIN1C6
|
NW->SE
|
Turns and is the only trail that is
curved in this segment
|
|
|
|
15:59
|
BAW3304
|
W->E
|
Turns and is the only trail that is
curved in this segment
|
|
2013-11-30
|
|
08:53
|
VIR6J
|
NW->SE
|
Turns and is the only trail that is
curved in this segment
|
7.9.1
Example images and charts
The images
and charts below were used to identify some of the flights shown in the table in
section 7.9 above. On the charts, North is at the top.
|
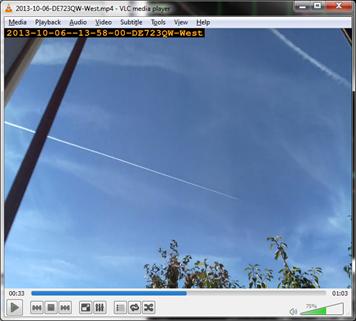
Lower trail was likely created by
flight EXS718N
|
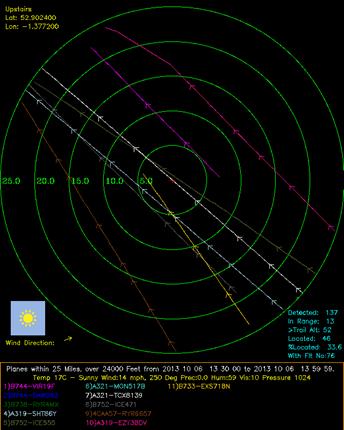
|
|
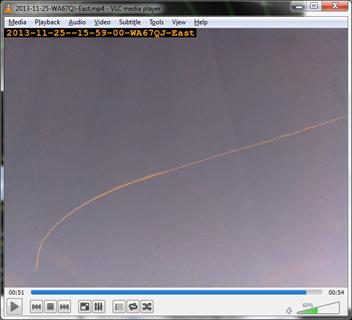 Trail was likely created by BAW3304 Trail was likely created by BAW3304
|
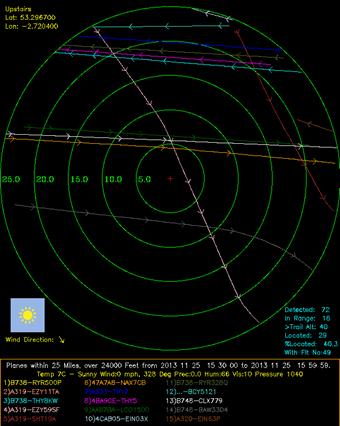
|
|
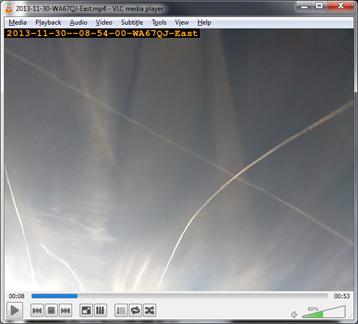
Curved Trail was likely created by flight VIR6J
|
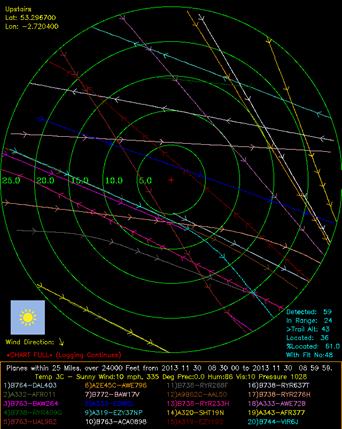
|
7.10
Weather Anomalies
On close inspection of some
of the time lapse videos from the Leeds tracker (which had the longest view to
the horizon), it was seen that some apparently strange cloud movements and
formations could be observed. Obviously, these are best illustrated by watching
the video itself, though I have tried to describe a few stills below.
7.10.1
Leeds 08 Dec 2013
On this particular day, the
view showed thick cloud covering most of the visible sky area – with clearer
weather in the distance (to the north).
|
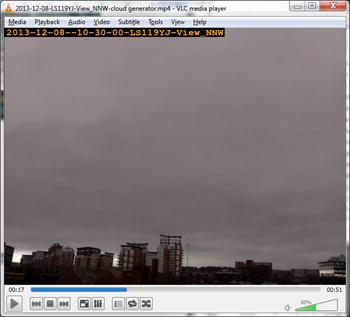
This view persisted for about 90 mins until 12:00
(noon).
|
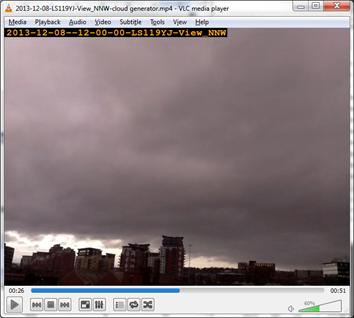
In a 30-minute period, the lower cloud layer clears
to the left (east) and reveals 2 higher cloud layers – a lower, thicker dark
layer and an upper, lighter coloured layer
|
|
An hour later, the cloud configuration looks
remarkably similar, with slight easterly movements of the upper and lower
cloud banks
|
Overall, a similar view persists for over 2 hours.
|
Why would these cloud banks persist over a fixed point on
the ground, when there are no mountain or high hill ranges below them?
In other videos, it seems there are banks of “persistent
cloud” formations – cloud forms and reforms over a fixed point on the ground
and the “rest of the weather” seems to flow past these clouds. Again, these
effects only become obvious from watching the time lapse videos.
7.10.2
Contrail/Distrail
On the Leeds tracker –
08:30 – 04 Dec 2013 – two of these curious trails were observed in quick
succession and these are less commonly seen than the “ordinary” trail. The
unusual “shadow” effects are also somewhat difficult to explain (or are they…?)


 Contrast
enhanced image to show grid of trails – (central vertical lines are a
reflection of the curtain)
Contrast
enhanced image to show grid of trails – (central vertical lines are a
reflection of the curtain)
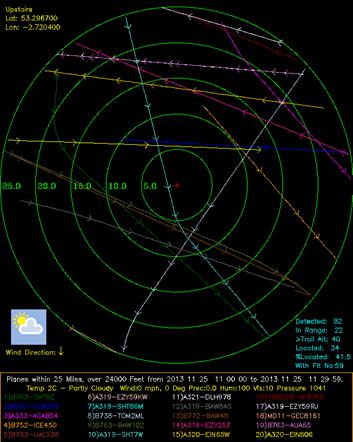
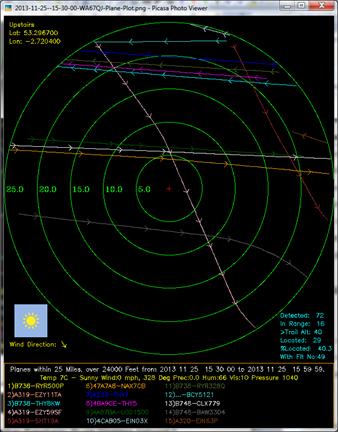
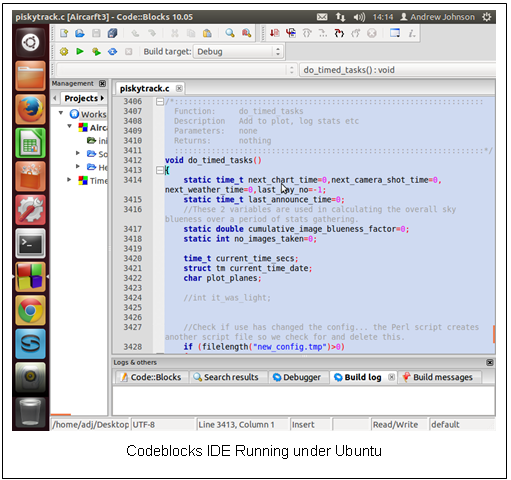 Mongoose
- Simple Webserver code – by Sergey Lyubka
Mongoose
- Simple Webserver code – by Sergey Lyubka