 Announcing “PiSkyTracker”
Announcing “PiSkyTracker”
This is to announce the
availability of a “kit” to enable people to track and log aircraft flying over
their location using a fairly cheap combination of electronics.
To make effective use of
the kit, you will need a PC or Mac for initial set up and an internet
connection to make best use of the main features. Following initial set-up, the
kit can run autonomously using only a little electricity.
It will work anywhere in the world – you just need the correct power supply for your
country.
Background

 For some years now, it has been possible to track
aircraft flying over your location using such devices as the AirNav Radarbox and the SBS-1, but these have been
quite expensive – costing as much or more than a Laptop PC, which is needed to
view the results.
For some years now, it has been possible to track
aircraft flying over your location using such devices as the AirNav Radarbox and the SBS-1, but these have been
quite expensive – costing as much or more than a Laptop PC, which is needed to
view the results.
Also online, sites such as
www.FlightRadar24.com, Flight Aware and Virtual Radar offer tracking and
aircraft identification features, though can be slow to update and somewhat
cumbersome to use. Similarly, there are Android and iPhone Apps which
interface to these online services and allow you, for example, to identify
flights by holding up your phone in the direction of a plane in the sky. Of
course, not everyone has an iPhone or Android phone...
The hardware solutions,
like the AirNav box, allow flights to be logged but their logging features are
not very flexible. For example, with the AirNav box (2010 version of the
software), all the messages received and decoded by the box can be saved to log
files – but in a day, 600,000 messages may be received from all the aircraft
that are detected, resulting in large log files, which need to be processed by
special software to extract useful information. Additionally, for continuous
24/7 logging, things like the AirNav box “tie up” a PC or laptop which may be
needed for other uses.
The Website and Phone App
solutions don’t have logging features of any great sophistication, so there is
something needed to allow this logging and counting of aircraft automatically.
This is where PiSkytracker
comes in to the picture.
Main Features
- Automatic
Logging of Flights and Flight statistics
You
configure whether you want PiSkytracker to log flights that pass over your
location. PiSkyTracker will log either all flights, or flights above a certain
altitude. It will keep count of the number of planes it detects in certain
altitude boundaries and their start lat/long and final lat/long co-ordinates.
One of the main reasons for
developing the kit and the software is for it to try and determine changes
in the level of air traffic which may occur when aircraft trails are seen
in the sky.

- Camera
Support to Photograph The Sky every Few minutes
PiSkytracker
can use a web cam or the custom Raspberry Pi Camera board to regularly take
photos of the sky – at an interval you choose. Photos are time-stamped and
annotated with a label which you can configure.
- Automatic
Capture of Weather Data
Weather
data is collected automatically (internet connection required and free account
set up may be needed) and collated with plane logs and charts, so that it can
be matched to plane observations
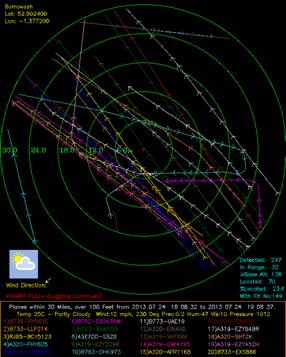
- Comprehensive
Plane Charting
Charting
parameters can be set so that planes within a certain range are drawn on charts
which are created every few minutes or every hour. Charting can be set so that
only planes above a certain altitude are tracked on the chart. This therefore
logs the paths of aircraft over your location (which is shown in the centre of
the chart).
- Spoken
Flight Announcements
The
built-in speech engine can be set to announce when planes above a certain
altitude come into range and it will indicate the direction in which to look
for them (you could use the Google Map to check as well – see below). You need
to attach some speakers to your Pi, of course! USB-Powered speakers can be
obtained cheaply
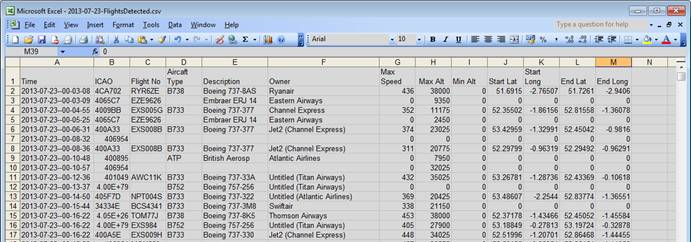
- Data
saved in Standard Formats
All
this data is saved on a standard SD Card in formats which can be easily read
and processed by other software. For example, flight logs and flight counts are
saved in CSV format and Charts are
saved in PNG format. Photos are
saved in JPG format.

Data
files can be uploaded to a server, automatically, if the user configures this
option – this allows statistics from different trackers in different parts of
the country to be collated more easily.
- Track
Planes in Your Local Area on a Google Map
You can connect to PiSkyTracker over your
network and see the planes the detector is picking up – this gives an idea of where
to look for them. The software on which PiSkyTracker is based included a google
map and simple webserver to allow planes to be tracked on a google map. This
same function is included on PiSkyTracker, but has been improved slightly. Try it out! Here is a link to my Raspberry
Pi detecting planes in the
- Network
File Access
Files
captured can also be easily access over your Local Area Network – from a
Windows or Mac computer, for viewing and analysis.
How does it Work?
The whole system relies on
the fact that many aircraft are now transmitting ADS-B (Automatic Dependent
Surveillance – Broadcast) messages when in flight. These messages contain the
following information
- A code number identifying the aircraft
- Flight Number
- Altitude
- Position (Latitude/Longitude)
- Speed
- Heading
(This page has a good
explanation: http://planefinder.net/about/ads-b-how-planefinder-works/)
The tracker simply receives and decodes these messages – then software can be
used to process the messages in any way desired. For example, you can count the
number of aircraft which are detected in a given period, within a certain range
and above a certain altitude or between certain altitudes.
Not all aircraft broadcast
all the information above. It seems only about 25% of aircraft detected in my
area broadcast their position.
Components of the Kit
The basic kit can be
obtained from me, for a cost of around £60 or with the Raspberry Pi Custom Camera for £80 – or more – depending
on options - and it can consist of the
following items. I will also be providing links so that people can buy their
own components if they wish and they will be able to download the software,
free, for PiSkyTracker:
 Raspberry Pi Single-Board Mini Computer and
Case
Raspberry Pi Single-Board Mini Computer and
Case
This
has been developed by the Raspberry Pi foundation and is essentially somewhat
similar to the “guts” of a modern mobile
phone. It runs a version of the Linux Operating System, and is a self-contained
computer system but without a screen, keyboard and mouse! 2 USB ports on the board
allow these things, and other hardware to be connected. A wired (RJ45) network
connection is also included.
 SD Memory Card
SD Memory Card
This
can be from 4GB in size upwards and stores both the raspberry Pi Operating
System and all the captured data. When the Pi is Powered down, the card can be
removed and put into a standard card reader for easy access to the data files
PiSkyTracker generates and captures.
 Power Supply
Power Supply
To
get the Pi to work properly, a 5 volt power supply must be added – and it needs
to supply at least 1.2A. Alternatively, if you have a powered USB hub, which
will supply more than 1A, this can be used to Power the Pi. The Pi is powered through
a Micro-USB socket – photo is of a power supply for the USB Hub.

- DAB/DTB
TV Dongle for Receiving Signals
The supplied software uses the dongle to decode the aircraft’s ADSB messages. It is basically a sensitive “programmable tuner”.
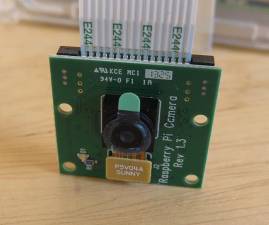
- Optional
Raspberry Pi Camera or IP Based Webcam
You
can use the Raspberry Pi camera board so that you have an “all in one unit” –
other than that, IP-based cameras are supported.
- Optional
Speakers/Headphones
If
you plan to take advantage of the Speech facility, you will need to connect
speakers – USB-powered speakers may be convenient.
- Optional
USB Hub
If
you plan to attach USB-powered speakers, a Hub may be required and you may
additionally wish to add other devices to your Pi such as a USB Hard Drive.
- Optional
Wireless Network USB Dongle
Raspberry
Pi can connect directly to your router using a network cable, but it may be
more convenient to connect via a USB Wireless dongle.
- Optional
Screen/Keyboard/Mouse
These
are not really needed, because the tracker is designed to be automatic and can
be configured by inserting the SD card in your main PC. You can connect the Pi
to a TV or monitor that has an HDMI input. Keyboard and Mouse can be connected
to a free USB port.
If you are interested in
getting hold of a kit, let me know. I will also be posting additional
information soon. I have more or less finalised the software development, but
may tweak a few things. Feedback, comments, ideas welcome!